Infrastructure for Scalable Robot Learning
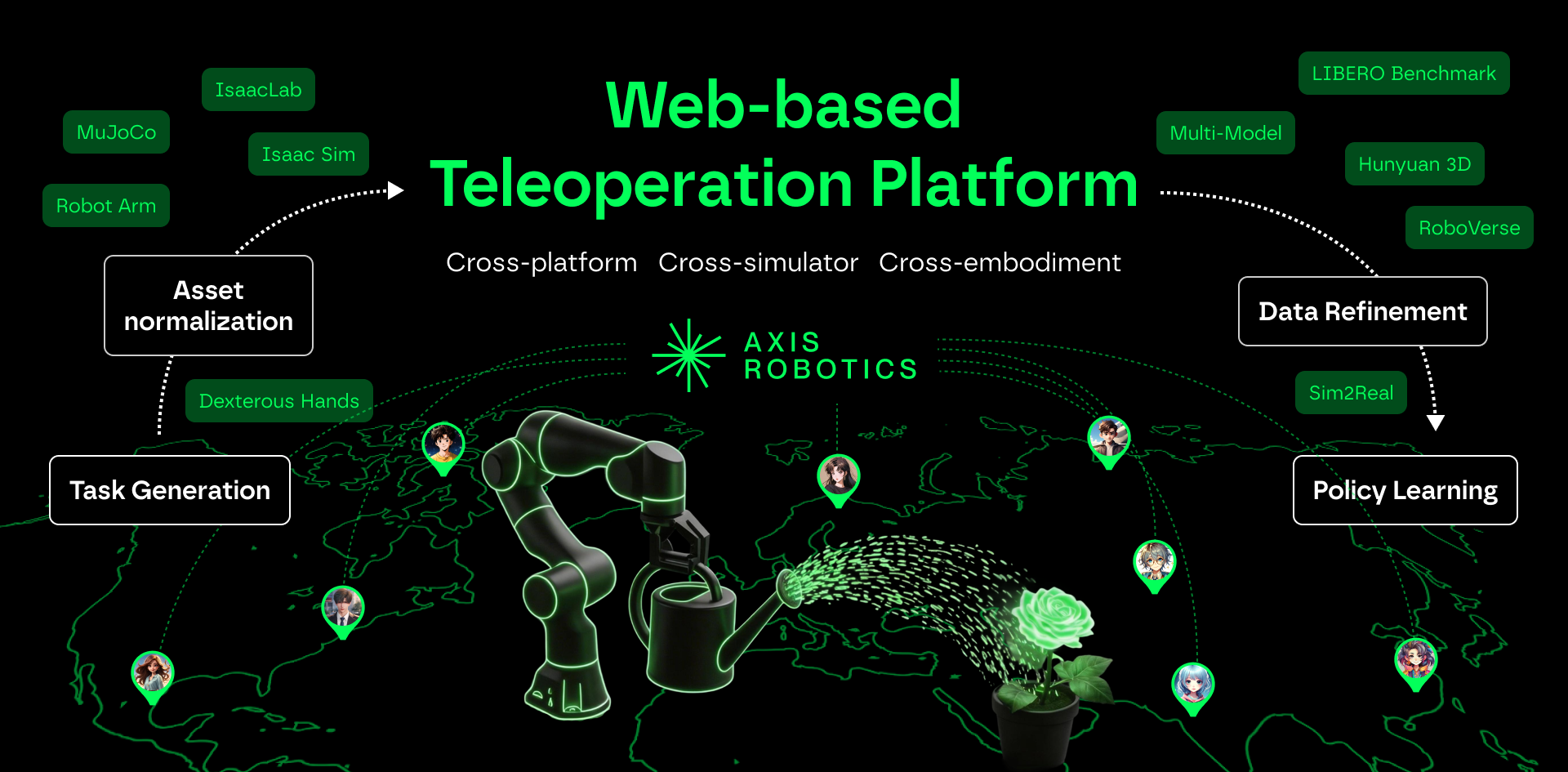
Axis Robotics Platform
A Cross-Simulator, Cross-Machine Infrastructure for Scalable Teleoperation and Generalizable Robot Learning
Axis Robotics Team
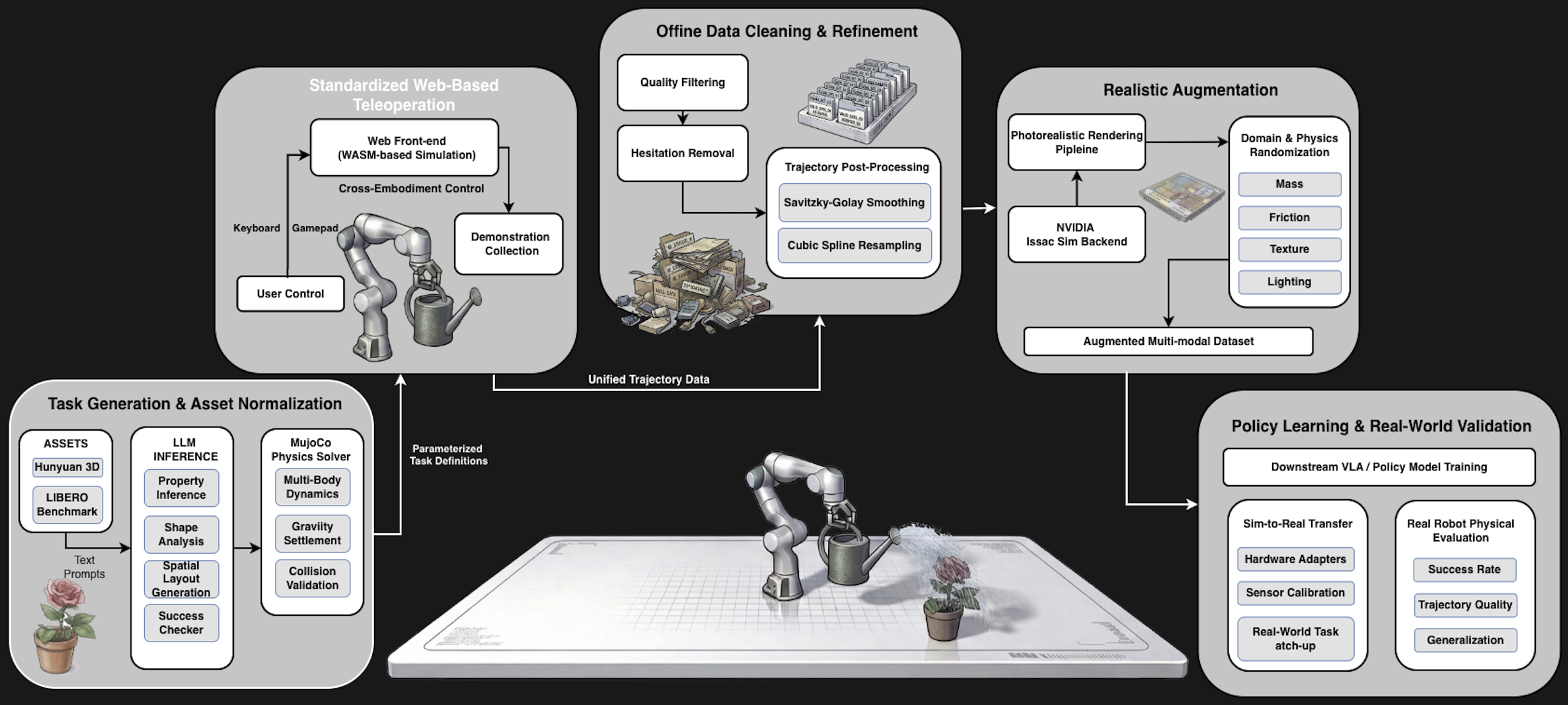
Axis Robotics Platform: A unified infrastructure bridging web-based teleoperation, GPU-accelerated realistic augmentation, and sim-to-real deployment.